Un robot caracol combate la contaminación por microplásticos en cuerpos de agua
Para responder a la creciente preocupación por los microplásticos, los científicos han creado un prototipo de robot inspirado en un caracol, diseñado para eliminarlos de océanos, mares y lagos.

{kind=link}
La contaminación plástica de los océanos representa una grave amenaza, ya que anualmente se depositan en los mares millones de toneladas, que van desde grandes desechos hasta microplásticos microscópicos. El peligro va más allá del enredo de la vida marina en plásticos de mayor tamaño y la ingesta de microplásticos, causando daños a las especies y afectando a toda la cadena alimentaria marina.
Si bien los esfuerzos actuales se centran en eliminar los desechos plásticos visibles a través de iniciativas como proyectos de limpieza de océanos, es posible que estas medidas no aborden de manera efectiva el problema generalizado de los microplásticos.
Los métodos comunes de recolección de desechos más grandes, como redes o cintas transportadoras, no son útiles para recolectar microplásticos, ya que estas pequeñas partículas requieren mecanismos de bombeo que consumen mucha energía para extraerlas.
Para responder a este desafío, los investigadores de la Universidad de Cornell se inspiraron en el caracol manzana hawaiano. Este enfoque innovador tiene como objetivo desarrollar un prototipo de robot capaz de imitar el movimiento ondulante del caracol para impulsar el flujo de agua y capturar microplásticos.
Las similitudes entre este robot y los caracoles
Siguiendo el modelo del caracol manzana hawaiano, el robot imita el movimiento de la pata del caracol para impulsar el flujo de agua y capturar partículas flotantes. Sunghwan Jung, profesor del departamento de ingeniería biológica y ambiental de la Universidad de Cornell y uno de los autores del estudio, explicó que se inspiró en la forma en que el caracol recolecta partículas de comida en la interfaz agua-aire para desarrollar un dispositivo capaz de recolectar microplásticos en océanos o en superficies acuáticas.
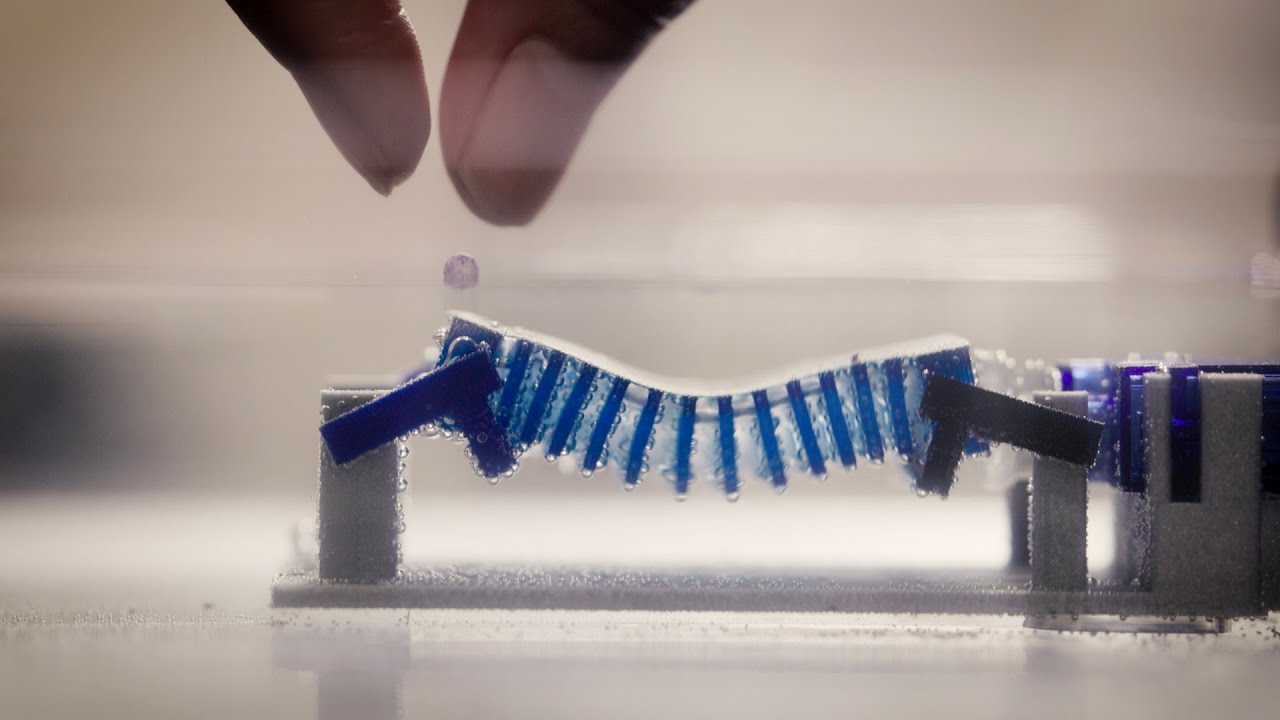
El prototipo modificado, derivado de un diseño existente, debería ampliarse para su uso práctico en entornos reales. Utilizando una impresora 3D, los investigadores crearon una lámina flexible similar a una alfombra con la capacidad de curvarse.
Debajo, una estructura helicoidal gira como un sacacorchos, haciendo que la estera ondule y genere una ola en el agua. Comprender el flujo de fluidos fue crucial, lo que requirió un análisis para caracterizar el comportamiento del bombeo.
El sistema de bombeo de fluido, inspirado en la técnica del caracol, funciona abiertamente en el aire. Los investigadores descubrieron que un sistema cerrado, con la bomba cerrada y utilizando un tubo para aspirar agua y partículas, requeriría un alto consumo de energía. En cambio, el sistema abierto inspirado en el caracol resulta significativamente más eficiente.
A pesar de su pequeño tamaño, el prototipo funciona con apenas 5 voltios de electricidad, demostrando su capacidad de succión de agua. Para contrarrestar el peso de la batería y el motor, es posible que se necesite un dispositivo de flotación para evitar que el robot se hunda.
Referencia de la noticia:
Pandey A., Chen Z., Yuk J., et al. Optimal free-surface pumping by an undulating carpet. Nature Communications (2023).